Dexterity Gen:
Foundation Controller for Unprecedented Dexterity
Dexterity Gen:
Foundation Controller for Unprecedented Dexterity
Achieving Unprecedented Dexterity
We introduce DexerityGen (DexGen), a foundational controller that empowers unprecedented dexterous manipulation skills, ranging from reorientation and assembly to the use of pen, screwdriver, and syringe.
Idea: Building a Skillful Prior
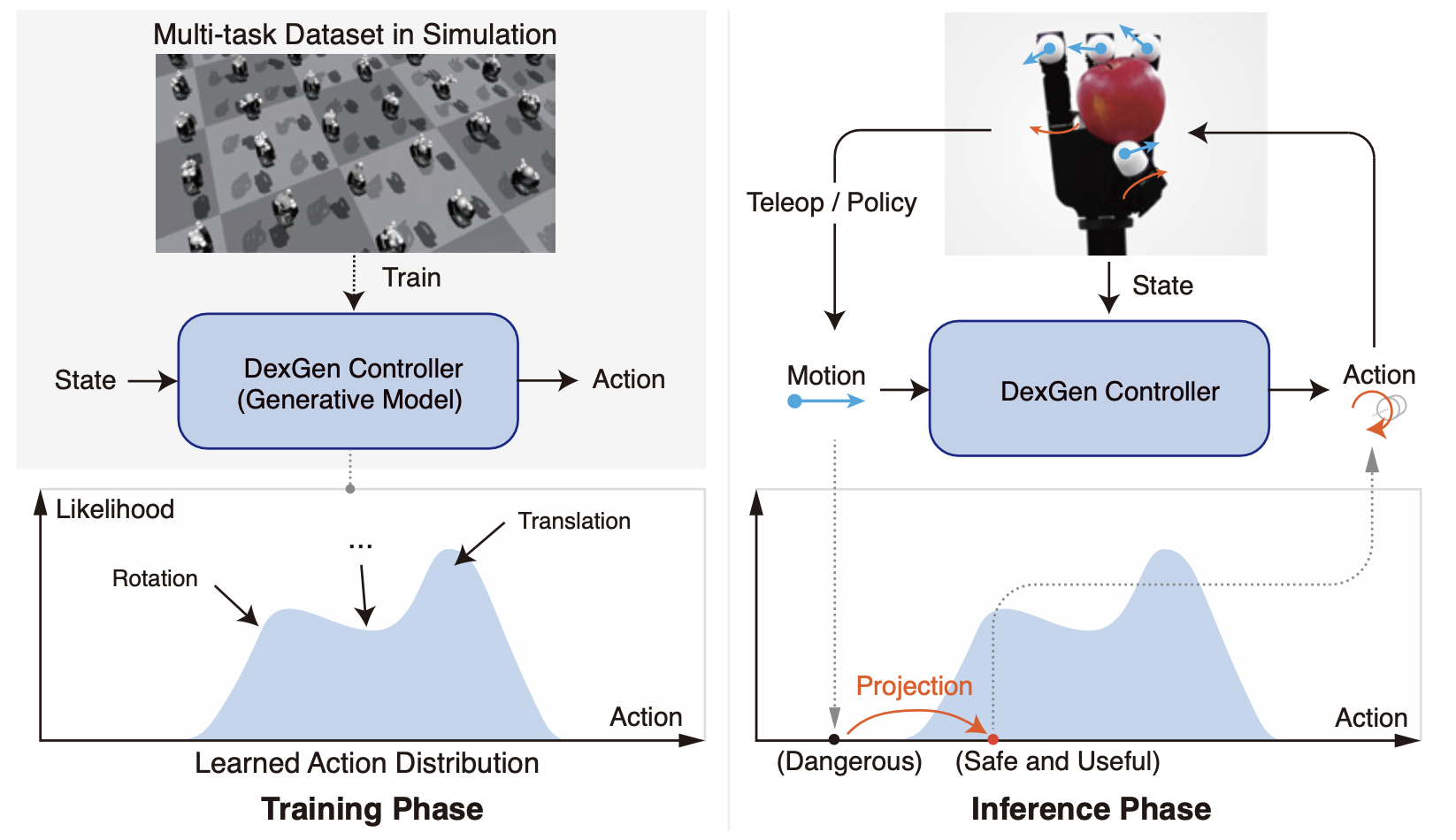
DexGen learns diverse dexterous manipulation behavior in simulation. It refines a coarse motion by a high-level policy such as teleoperation to fine dexterous actions during deployment.
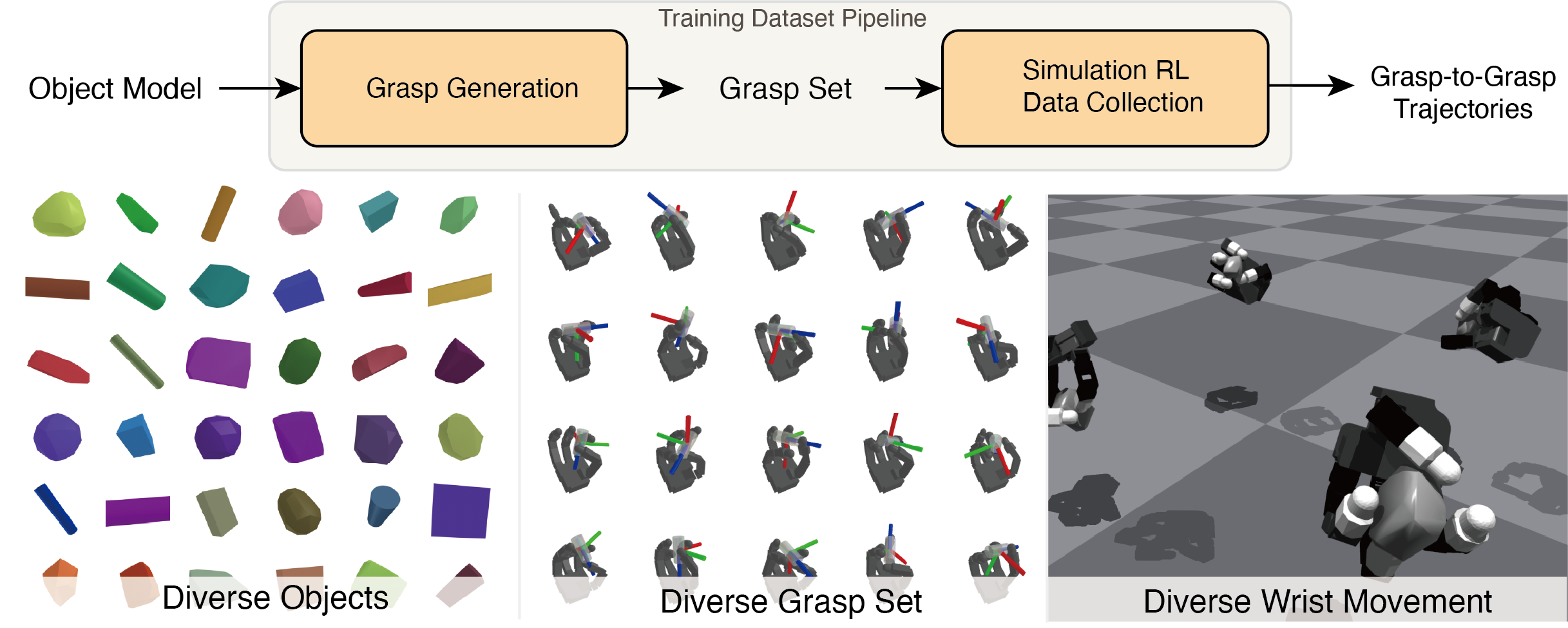
Scaling up Low-Level Dexterous Manipulation Dataset
We pretrain DexGen on a huge multi-task dexterous manipulation dataset. The core of our dataset is a large Anygrasp-to-Anygrasp dataset generated by reinforcement learning agents.
Application: Robust Teleoperation with DexGen.
Using teleoperation to perform dexterous manipulation is extremely hard.
DexGen makes it possible, in diverse challenging setups, for the first time.
Videos below demonstrate a human practicing teleop over a teleoperation system enhanced by DexGen. DexGen can reject dangerous actions in diverse scenarios.
More Basic Skill Evaluations
DexGen assists a clumsy user to perform sophisticated dexterous in-hand object manipulation skills. Small objects, rough edges, and gravity...
DexGen handles them all.
Videos are in 2x.
Reorienting diverse objects.
Pinch grasp to Power grasp.
Concluding Remark: Looking Forward
Dexterity Gen unlocks endless possibilities. It enables dexterous tool use data collection in the real world. It stabilizes dexterous grasping and manipulation and allows more flexible high-level policy designs. We believe it will be a foundational building block in future robotic agents.
Acknowledgement
This work was partially carried out during Zhao-Heng Yin's intern at the Meta FAIR Labs. This work is supported by the Meta FAIR Labs and ONR MURI N00014-22-1-2773. Pieter Abbeel holds concurrent appointments as a Professor at UC Berkeley and as an Amazon Scholar. This paper describes work performed at UC Berkeley and is not associated with Amazon.