Alex Z. Yin
CS PhD @ UC Berkeley EECS
Alex Zhao-Heng Yin
I am a CS Ph.D. student at BAIR, UC Berkeley.
I research robotics and AI.
We explore new ideas for creating intelligent robotic systems that learn to serve and enhance human lives. We value the elegance of intelligence and are driven by the excitement of tackling the most complex challenges.
Robot Brain Research
Our mission is to develop scalable systems for building the robot brain.
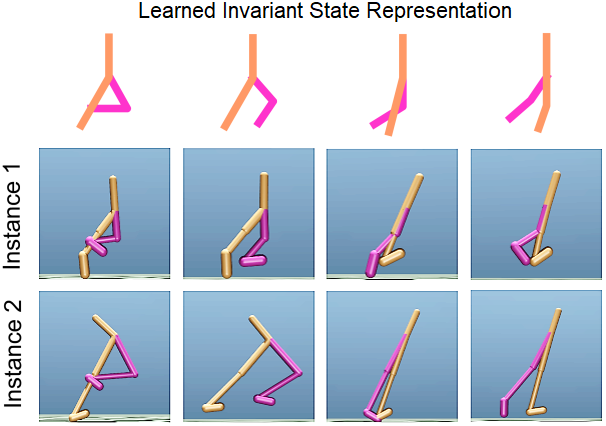
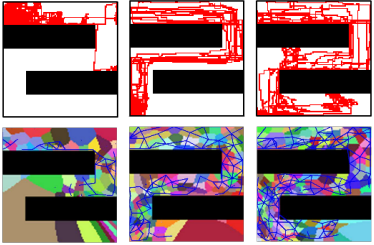
Objects, Motions, Actions. We study the mind's atoms that shape our world.
Selected Works

Biography
Nanjing - Hong Kong - San Francisco
- B.S. CS, Mathematics. Nanjing University.
- M.Phil. EE. HKUST Robotics Institute.
- Ph.D. CS. UC Berkeley EECS.
During high school (N.S.F.Z.), I studied humanities.
I am advised by Pieter Abbeel.
E-mail: zhaohengyin (at) cs.berkeley.edu